2022
Разработка метода снижения неопределённости калибровки базовых оптоэлектронных датчиков угла поворота углоизмерительной установки (КИДУ)
Разработан модифицированный алгоритм кросс-калибровки базовых (референтного и рабочего) оптоэлектронных датчиков угла поворота (ОЭДУ) углоизмерительной установки модели АЭ.1686. С его помощью удаётся полностью учесть искажающий вклад, вносимый как систематической составляющей погрешности шкалы датчика, используемого в качестве эталона сравнения, так и систематической составляющей шкалы, которая является объектом калибровки. Это становится возможным при точном согласовании параметров процесса кросс-калибровки и характеристики узлов калибруемого датчика. Так называемый принцип когерентности комплементарных гребенчатых фильтров, предложенный в лаборатории, позволяет минимизировать остаточный искажающий вклад, вносимый шкалой датчика, используемого в качестве эталона сравнения, практически до нуля.
Экспериментальный стенд для контроля базовых датчиков КИДУ
2016 г.
с.н.с. Будниковым К.И. и н.с. Курочкиным А.В. предложен и. запатентован Способ фильтрации потока HTTP-пакетов на основе пост-анализа запросов к Интернет-ресурсу и устройство фильтрации для его реализации.
Изобретение относится к области компьютерных сетей и может быть использовано для ограничения доступа пользователей к выделенным ресурсам сети Интернет по протоколу HTTP. Решение использует пост-анализ (последующий анализ) пользовательского запроса к Интернет-ресурсу, когда поток пакетов (включая запрос к Интернет-ресурсу) пропускается через фильтрующее устройство без обработки, а анализ пользовательского запроса к Интернет-ресурсу проводится в промежуток времени между его отправкой к web-серверу и приемом ответа на него от web-сервера.
Техническая эффективность изобретения по сравнению с аналогичными устройствами фильтрации по адресу HTTP заключается в уменьшении времени задержки прохождения через устройство фильтрации пользовательского запроса к Интернет-ресурсу, в увеличении числа обслуживаемых пользователей, а так же в расширении функциональных возможностей и ассортимента устройств данного назначения. Имитационное компьютерное моделирование показало уменьшение среднего времени прохождения пользовательского запроса к web-ресурсу через эмулируемое устройство фильтрации, которое использовало способ фильтрации, предложенный в изобретении, до 14% по сравнению с устройством, которое использовало традиционный способ фильтрации. По сравнению с устройствами фильтрации по IP-адресу изобретение позволяет осуществлять фильтрацию конкретного ресурса провайдера, а не всех ресурсов, принадлежащих фильтруемому IP-адресу.
При использовании провайдерами доступа к сети Интернет изобретение позволяет подключить большее количество абонентов и увеличить доход от абонентской платы. Устройство фильтрации, установленное в организации, позволяет ограничивать доступ в рабочее время к развлекательным ресурсам Интернет, а также ресурсам с плохой репутацией из установленного в организации дополнительного списка. Возможна установка фильтров в учебных заведениях для ограничения доступа к информации, не предназначенной для учащихся.
Изобретение рекомендовано Федеральным институтом промышленной собственности (ФИПС) для включения в список перспективных российских изобретений за 2016г.
2014 г.
Создана и введена в опытную эксплуатацию АСУ Большого солнечного вакуумного телескопа (БСВТ) с гелиостатной питающей оптикой (поселок Листвянка, Байкал). Автоматизированы наблюдения за процессами, происходящими на Солнце, а также работа вспомогательных подсистем телескопа: вакуумирования, термокомпенсации входного иллюминатора, разгрузки зеркала. Создана подсистема гидирования, обеспечивающая автоматическое перемещение заданной точки изображения Солнца на визуализирующую и регистрирующую аппаратуру с погрешностью наведения (по азимуту и углу места) - не более 0,5''. Время от момента освещения Солнцем любого из четырех датчиков модуля слежения (рис.1) до перемещения заданной точки изображения Солнца в центр регистратора (соответствует центру щели спектрографа) - не более 60 сек.
Создано программное обеспечение, которое позволяет проводить управление телескопом и исследование Солнца в ручном и автоматическом режиме как при работе с отдельными подсистемами, так и для решения более сложных задач, связанных с взаимодействием нескольких подсистем.
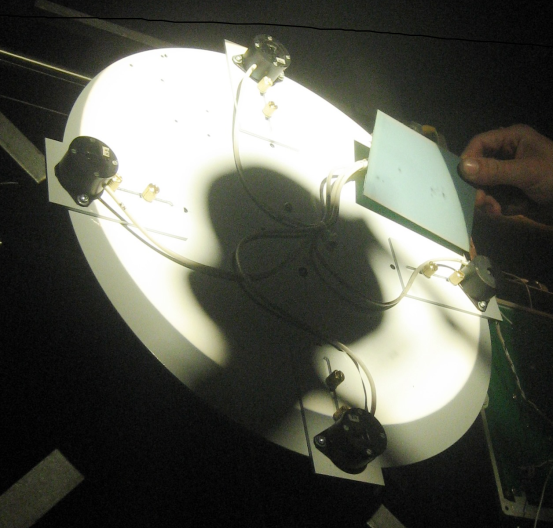
Рис.1. Датчики модуля слежения
Кроме расширения функциональных возможностей, например, автоматическое заведение изображения Солнца в трубу телескопа, существенно облечена работа оператора во время проведения наблюдений, а также упрощена настройка и юстировка.
С учетом того, что телескоп является инструментом проведения научных исследований и подразумевает постоянное расширение круга решаемых им задач, создана и экспериментально проверена архитектура программного обеспечения, которая позволяет:
- использовать отработанные на одном телескопе алгоритмы управления устройствами, подсистемами и технологическими процессами на других телескопах;
- интегрировать в уже существующее программное обеспечение АСУ функционально сопоставимые, но разные типы устройств;
- использовать разные операционные системы (Windows, Linux) в качестве базовой платформы для АСУ БСВТ;
- интегрировать в основное программное обеспечение АСУ специализированные программы, позволяющие существенно упростить и облегчить программирование прикладных задач, возникающих при проведении научных экспериментов на телескопе, характеризующихся наличием большого количества взаимозависимых процессов (заведение, сканирование, написание технологических программ);
- проводить отладку некоторых узлов программного обеспечения в условиях отсутствия реального оборудования, на основе комплексного набора средств виртуальной отладки.
Разработана и создана программная модель устройства, фильтрующего запросы от WEB-клиента к WEB-серверу по протоколу HTTP с использованием исследованных ранее алгоритмов: внепланового закрытия HTTP-сессии и маскирования ответных данных. Устройство имеет две симметричные точки подключения и устанавливается в разрыв соединения между сетью клиента и сетью сервера. Модель состоит из двух равнозначных каналов, которые обеспечивают прохождение через устройство и фильтрацию пакетного трафика.

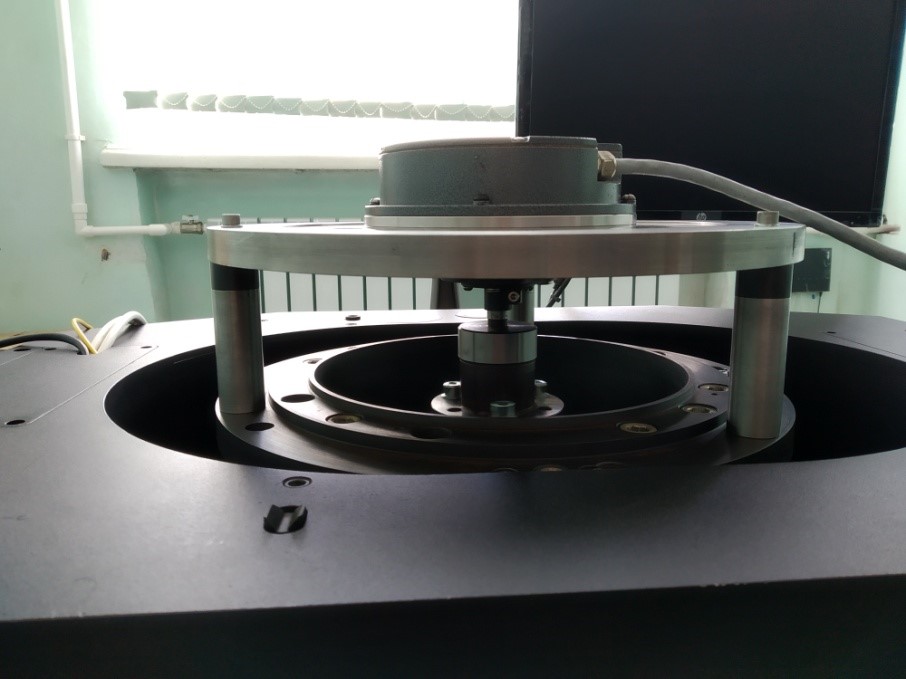
Рис. 2. Общий вид УИМ АЭ.1686
Разработан и создан экспериментальный образец углоизмерительной машины (УИМ) модели АЭ.1686 (рис. 2), предназначенной для измерения и определения угловых параметров и других характеристик рабочих образцов и фотошаблонов оптических лимбов, круговых шкал, растров и многоразрядных кодовых дисков (далее углоизмерительные структуры – УИС) в автоматическом режиме:
- углового положения границ элементов топологии;
- угловой привязки положений элементов топологии, находящихся на разных радиусах;
- углового положения диаметров элементов топологии;
- углового положения осей элементов топологии;
- углового отклонения положения границ элементов топологии;
- отклонения положения осей от номинальных значений, указанных в конструкторской документации (КД);
- ширины и разности ширины элементов топологии.
Проведены предварительные испытания и получены следующие характеристики установки.
Предварительные технические характеристики УИМ АЭ.1686
|
№ п/п
|
Параметр
|
Значение
|
|
1
|
Рабочий диаметр стола, мм.
|
210
|
|
2
|
Частота вращения стола. об/с.
|
1
|
|
3
|
Горизонтальный ход считывающей головки, мм.
|
125
|
|
4
|
Вертикальный ход считывающей головки, мм
|
25
|
|
5
|
Погрешность измерения углового положения границ элементов топологии, угл. с.
|
1
|
|
6
|
Погрешность измерения угловой привязки положений элементов топологии, находящихся на разных радиуса, угл. с
|
1
|
|
7
|
Погрешность определения ширины элементов топологии, мкм
|
± 0,1
|
|
8
|
Погрешность определения ширины и разности ширины элементов топологии, мкм
|
± 0,1
|
2004-2008
Control System for Novosibirsk HydroElectroStation
|
 |
|
Control System for Single Crystal Growth Furnace
|
 |
Control System for Single Crystal Growth Furnace |
Control System for Sonar Telescope
|
 |
Control System for Sonar Telescope |
Control System for Simulating of Single Crystal Growth
|
| No image available |
Control system for simulating of single cristal growing process (nanotechnology). |
2013 г.
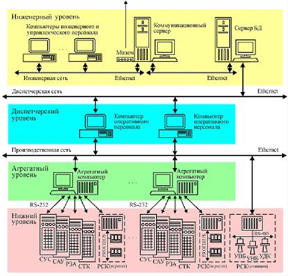
Для управления Большим солнечным вакуумным телескопом разработана автоматизированная система, имеющая распределенную архитектуру, основанная на АРМ контроллерах подключаемых по каналам Ethernet к компьютеру астронома - оператора.
Такой выбор обусловлен следующими особенностями:
- большим количеством подсистем обеспечивающих процесс наблюдения (автоматической ориентации телескопа на солнце, выбора и гидирования заданной точки Солнца, сканирования его области, получения спектров, мониторинга видеоизображений);
- большим количеством подсистем обеспечивающих уникальные (прост-ранственное разрешение 0,2 угл. с.) характеристики телескопа (вакуумирования, разгрузки зеркала сидеростата, термокомпенсации входного иллюминатора);
- внушительными размерами телескопа (фокусное расстояние - 40м).
Контроллеры обеспечивают управление двигателями и другими исполнительными устройствами подсистем в соответствии с алгоритмом текущего эксперимента наблюдений Солнца. В составе АСУ имеются видеокамеры и мобильный пульт управления – переносной компьютер с каналом Wi-FI.
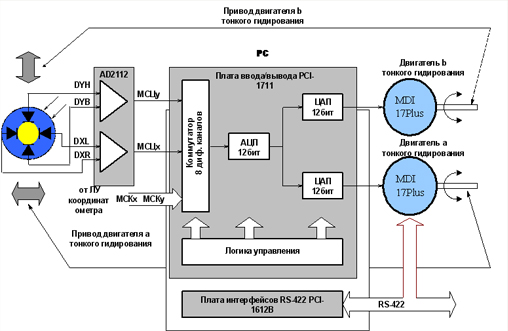
Предложен метод построения системы контроля погрешности формирования прецизионных углоизмерительных структур датчиков, входящих в состав систем управления позиционированием главных зеркал комплексов наблюдения за космическим пространством.
Прецизионные датчики угла поворота, входящие в состав систем управления позиционированием главных зеркал оптических комплексов наблюдения космического пространства не имеют собственной подшипниковой системы и размещаются непосредственно на осях, угол поворота которых они должны контролировать. Эта особенность используемых датчиков определяет специфические пути построения систем контроля геометрии их кодирующих узлов, причём в идеале эти системы должны обеспечить контроль структур с погрешностью не хуже ± 0,05".
Для достижения поставленной цели предложено использовать дифференциальный принцип измерения характеристик контролируемых углоизмерительных структур (патент РФ № 83133), суть которого состоит в том, что с помощью прецизионного референтного углового датчика производится одновременное измерение погрешности положения элементов топологии двух других структур, из которых одна является контролируемой структурой, а вторая – рабочей. При этом предполагается, что паспортные характеристики рабочей структуры должны быть известны с необходимой точностью.
2010-2012 гг.
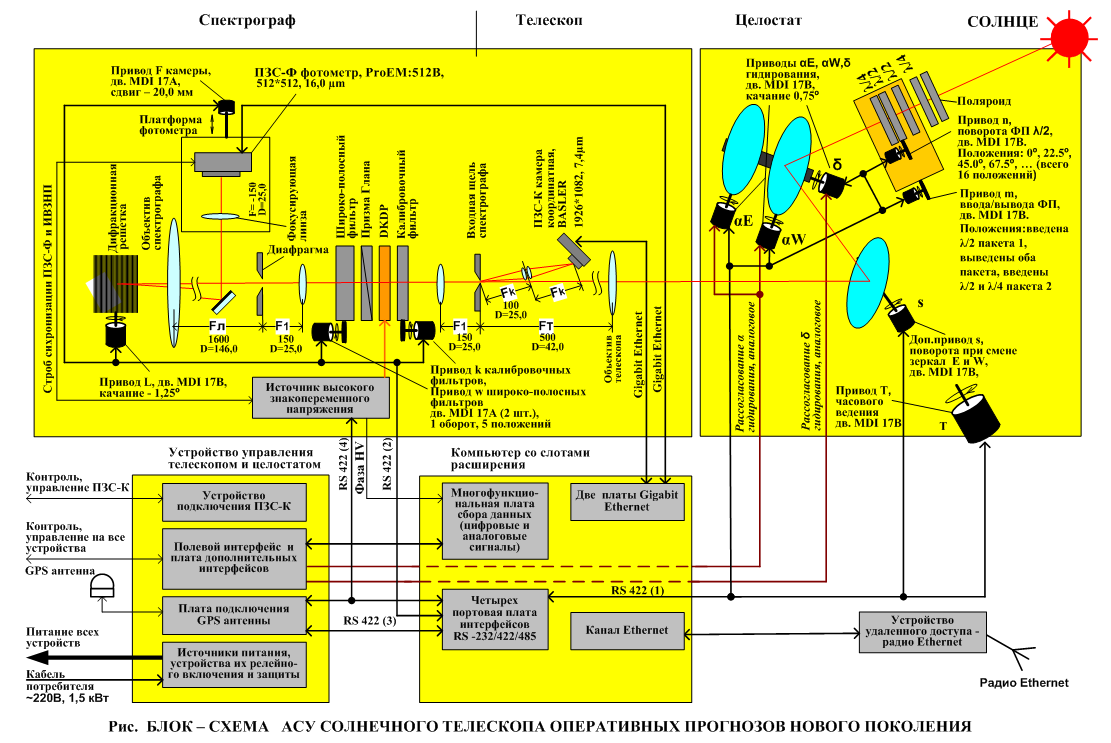
В лаб. 16 ИАиЭ СО РАН разработан аппаратно-программный комплекс автоматизированного управления тремя солнечными телескопами оперативных прогнозов нового поколения (СТОП 1-3) созданными ИСЗФ СО РАН и предназначенными для получения экспериментальных данных о крупномасштабных магнитных полях (КМП) Солнца.
Аппаратная часть системы управления телескопа обеспечивает непосредственный доступ к контролю и управлению устройствами телескопа: шаговыми двигателями приводов, высоковольтным источником, ТВ камерами подсистем гидирования и получения спектра. Инструментальное и прикладное программное обеспечение телескопов СТОП 1-3 разработано с использованием кросс - платформенного инструментария QT (http://qt.nokia.com/). Прикладная часть ПО с помощью графического интерфейса оператора (ГИО) позволяет отображать состояние узлов телескопа, показывать изображение спектра и видимое изображение солнца, формировать задание программе сканирования диска Солнца. Подсистема слежения обеспечивает перемещение изображения солнечного диска относительно входной щели спектрографа и удерживание его во время измерения. Установка поляризационных фильтров, калибровочных пластин производится также с использованием ГИО.
Реализовано программное обеспечение автоматической настройки и калибровки аппаратуры телескопа, в том числе: фокусировки камеры спектрографа, определения текущего значения полуволнового напряжения оптического модулятора и текущего (суточного) угла направления сканирования (положение оптической щели спектрографа) относительно оси вращения Солнца.
Обеспечено автоматическое сканирование диска Солнца с заданным растром, что позволило получать данные для расчета магнитограммы Солнца. Типовой шаг сканирования около 30'', время получения данных полной магнитограммы Солнца -15 минут.
Сотрудники лаб. К.И. Будников, А.А. Лубков, С.А. Лылов за настройкой СТОП 1


Целостат телескопа СТОП 1,
Байкальская астрофизическая обсерватория (поселок Листвянка)
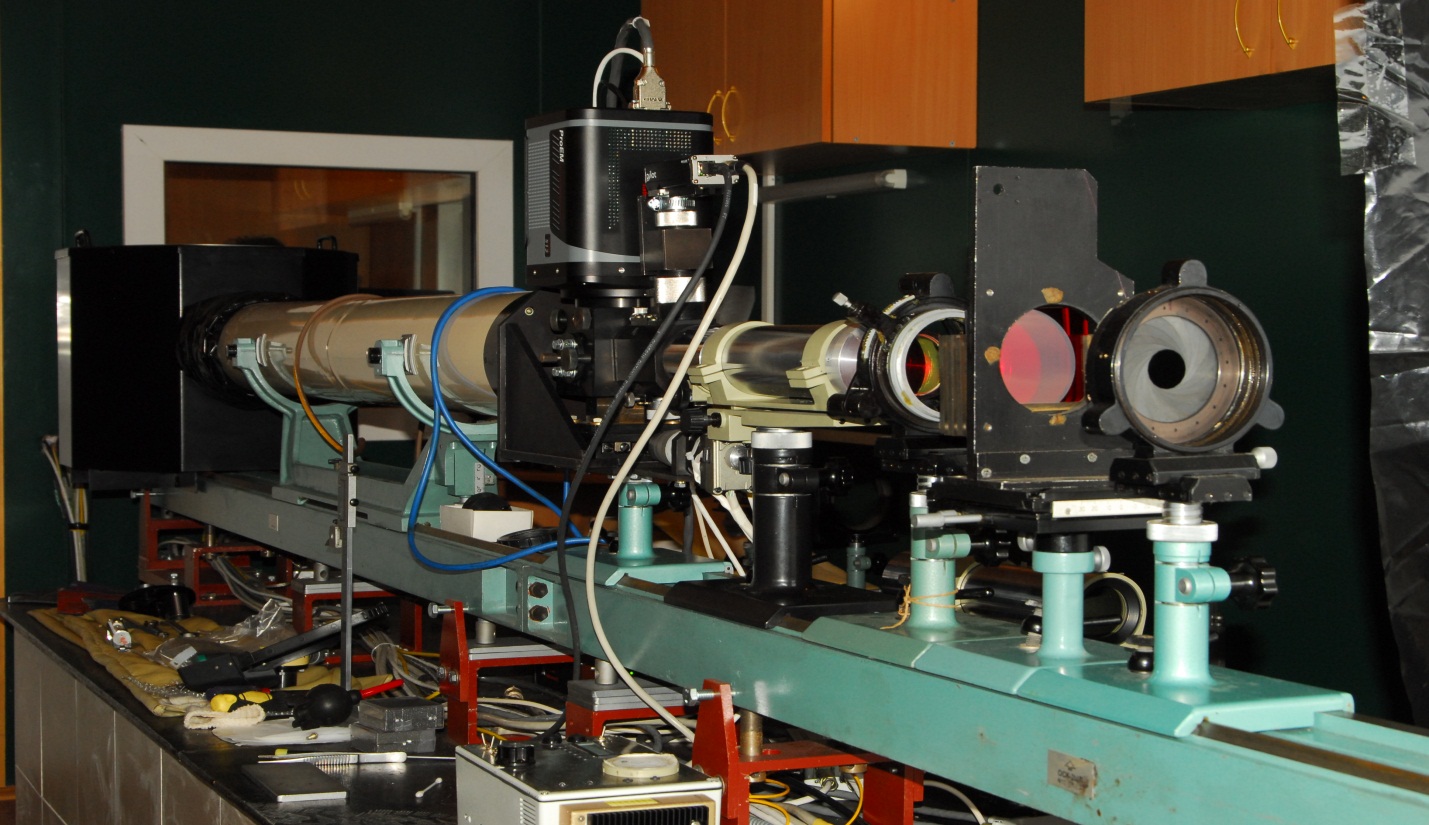
Оптическая скамья телескопа СТОП 1

")
")